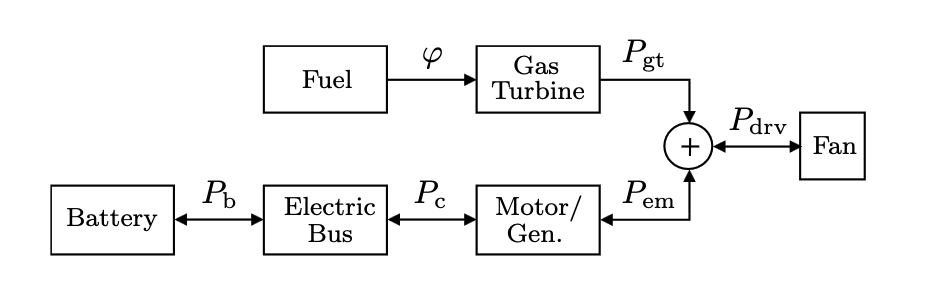
Energy management for hybrid-electric aircraft
Hybrid-electric propulsion systems are a vital part of the technology roadmap for decarbonising the air transport industry. The commercial viability of such systems relies on onboard energy management.
Through a convex formulation of mathematical models of the propulsion system of a hybrid-electric aircraft, a
computationally tractable optimisation problem is constructed whose globally optimal solution is used to arbitrate in
real time the power demand of the aircraft between the gas turbine and electric motor, allowing significant fuel savings. Both series and parallel hybrid-electric propulsion architectures are considered.
Computation times are reduced by an order of magnitude compared to generic convex optimisation solvers like CVX
thanks to a custom implementation of a first order solver (ADMM), enabling fast real-time implementations and
reductions of in-flight CO2 emissions for new generations of more-electric aircraft.
Future research will consider the use of other types of hybrid-electric architectures based on fuel cells and liquid hydrogen gas turbines to meet the objectives of net zero emissions.
Difference of convex functions in nonlinear robust MPC
Robust model predictive control (MPC) is concerned with preserving performance
and closed-loop stability for systems subject to uncertainty, while offering the
properties of optimality, real-time tractability and constraint satisfaction of classical MPC.
This approach is promising in air transport scenarios where robustness, efficiency and
safety are vital requirements. However, a direct application of robust MPC methods to realistic nonlinear problems requires the solution
of numerically intractable optimisation.
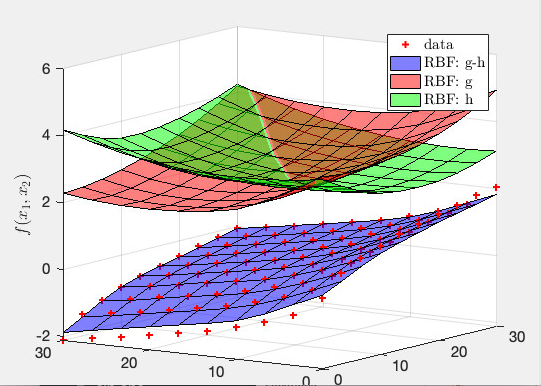
In this research, robust MPC is made computationally tractable for nonlinear systems representable as a difference of
convex (DC) functions. The approach is based on successively linearising the system around guess trajectories and
treating the linearisation error as a bounded disturbance in a robust optimisation framework. Crucially, by convexity
of the dynamics, the linearisation error is necessarily convex and takes its maximum at the boundary of the uncertainty
set, allowing tight bounds to be computed. This provides a very general method for solving uncertain optimisation
problems as a sequence of computationally tractable convex programs where the dynamics are approximated tightly
by a set of convex inequalities. This convex optimisation is then leveraged in a robust MPC framework.
The approach can be applied to any continuous nonlinear system for which a DC decomposition can always be computed. Techniques such as sums-of-squares polynomials,
deep neural networks, and machine learning can be used to learn the nonlinear dynamics in DC form. The expected outcome of this research
will be the systematic synthesis of safe, robust, computationally efficient and optimal controllers for safety-critical applications.
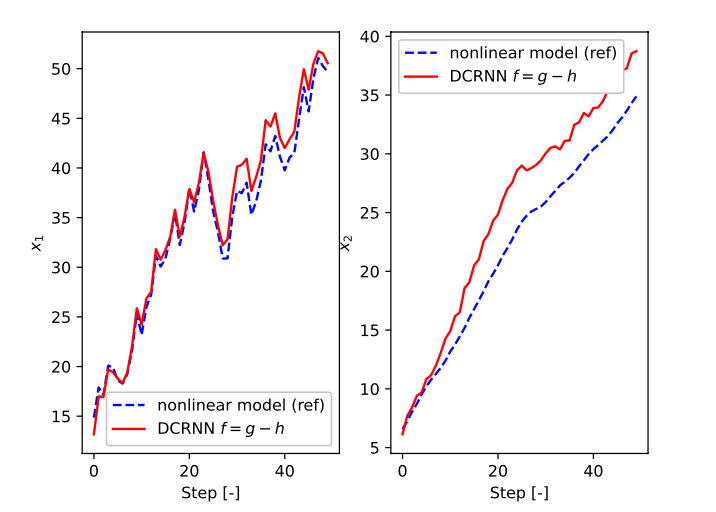
Robust control of an eVTOL aircraft in urban air mobility scenarios
This project is a collaboration with Rolls-Royce. Building on the theory of DC functions
decomposition, a systematic data-driven computationally
tractable robust nonlinear MPC has been developed and applied to new eVTOL aircraft in urban air mobility scenarios.
The resulting control scheme offers robustness guarantees to model uncertainty and exogenous disturbances, paving
the way to future widespread adoption in safety-critical applications. It will allow Rolls-Royce to strengthen its leadership position in the
flying taxi business by providing tools for certification of their unmanned technology by aviation authorities.
Modeling and control of a passively-coupled tilt-rotor vertical takeoff and landing aircraft
We conceptualised, designed and flight-tested a novel type of passively-coupled tilt-rotor vertical take-off and landing
drone capable of rapid transitions between vertical and forward flight. The drone consists of a quadrotor
frame attached to a fixed-wing frame by an unactuated hinged mechanism. The platform is capable of smooth
transitions from hover to forward flight without the use of tilting actuators: transitions are made possible by differential
thrust between the fore and aft propellers of the quadrotor frame. This simplifies greatly the mechanical design and
control problem. A cascaded control architecture based on P/PID controllers is proposed to achieve inner-loop attitude,
height and forward velocity control. Simulated and experimental results are obtained with close match for hover, transitions, forward flight, and banked turn maneuvers. This concept VTOL aircraft is particularly desirable in urban
air mobility applications requiring operation in restricted airspace and rapid transition for improved endurance.